Czech playwright Karel Capek coined “robot” for human-like creatures in a 1921 play, adapting an old Slovakian term for forced labor, rabota. Made from “chemical batter,” his robots disappeared into the annals of science fiction. But the term stuck and entered the English language in 1923.
Today’s robots are anything but chemical batter and are specialized to carry out tasks too dangerous, cumbersome, remote, or complex for humans to handle. They range from large, multi-arm robots used in automobile assembly to bomb-disabling robots used by police and military to nanorobots used in medicine for delivering drugs through the bloodstream.
For more than two decades, the electric power industry has explored robots’ potential for critical tasks. In transmission and distribution, EPRI has investigated robots able to:
- Glide along shield wires to inspect overhead transmission lines
- Maneuver inside underground vaults to inspect electrical cables
- Climb on and inspect overhead porcelain, glass, and polymer insulators
- Inspect substation components and protect them from intruders
- Swim through the oil inside large transformers to inspect the core
Transmission Line Robots
Overhead transmission lines are among the electric power utilities’ most widely dispersed assets. In the United States alone, they traverse tens of thousands of miles—many of them in remote areas. Inspection is needed once or twice a year to assess component aging and right-of-way clearance. Historically, crews conduct visual inspections or use cameras and other instruments as they walk rights-of-way, climb structures, or travel in helicopters. While critical to system reliability, the work is time-consuming, costly, and sometimes dangerous.
Following nearly two decades of research and testing, EPRI developed an autonomous transmission line inspection robot named “Ti.” It glides along the shield wire above energized conductors, covering an average of 3 miles per day. Bypass systems help Ti get around obstacles and transmission towers.
“We’re deploying Ti in Ohio on a 75-mile segment of a 138-kilovolt transmission line operated by American Electric Power,” said Andrew Phillips, EPRI vice president of transmission and distribution infrastructure. “When it is up and running in early 2019, it will be the world’s first fully autonomous transmission line robot. It draws energy from the transmission line’s electromagnetic fields at key points to charge its batteries, glides along the line taking photos and various readings, and sends them in real time to workers. It can complete the 75-mile line in five weeks.”









Ti’s high-definition visual and infrared cameras inspect rights-of-way and components and determine clearances between power lines and trees. Its electromagnetic interference detectors can locate discharges such as arcing. Other instruments planned for future deployments: lightning sensors, vibration sensors for windy areas, and leakage current sensors for coastal areas where salt can contaminate components. If speed is required—for example, to pinpoint the source of a recent outage—Ti can move up to 5 miles per hour.
“We’re working on a configuration similar to a railway roundhouse that would enable the robot to move to another transmission line as it goes through a substation,” said Phillips. “This will greatly increase its usefulness and value.”
EPRI is examining Ti’s costs and benefits such as improved safety and data quality. By pausing in one spot, the robot can capture better quality images than those taken from a helicopter flying at 30 to 60 miles per hour. “Ti can eliminate the need for detailed helicopter inspections, reducing risk,” said Phillips.
Transmission Insulator Robots
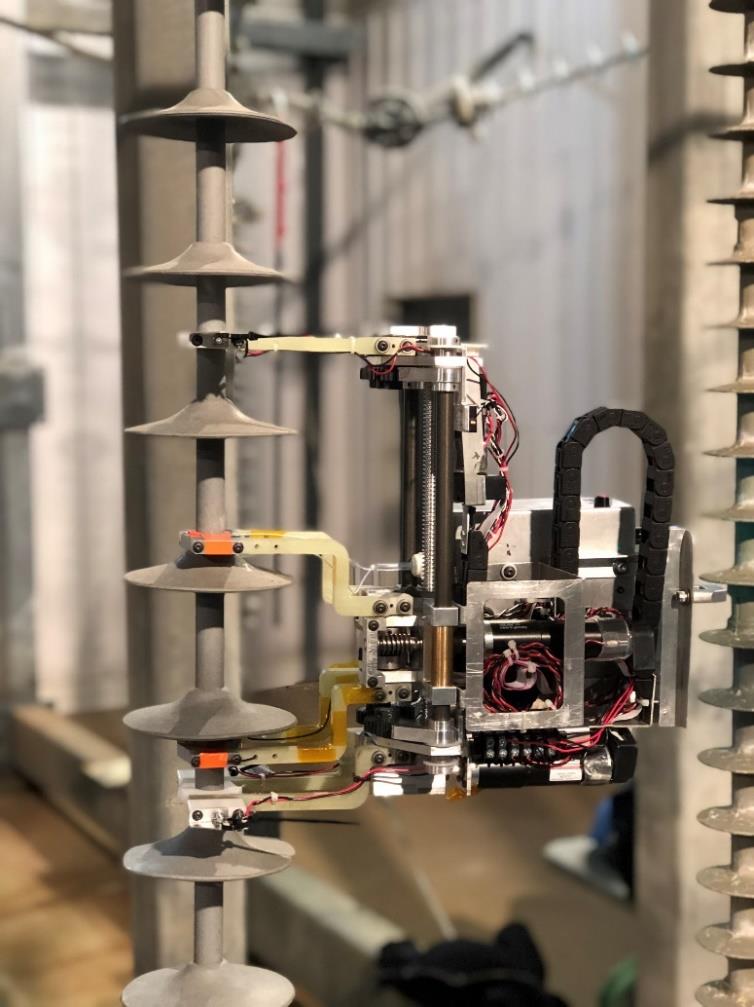
Research on insulator robots is driven by the need to mitigate safety risks posed by defects in polymer insulators, which are 3 to 15 feet long depending on the power line’s voltage. “Polymers are the predominant insulator material today, and the problem is that you can’t see an internal defect affecting electrical performance. You need an electrical tester that makes direct contact with the insulator,” said EPRI Senior Project Manager Erika Willis.
EPRI has developed and commercialized the Live-Line Working Non-Ceramic Insulator Tool, which can identify conductive defects. However, workers must manually apply the tool using a hotstick. Holding a 10-foot long fiberglass hotstick that sways with the weight of an instrument on the end can be taxing on the body, especially if the worker is up high in a bucket truck battered by wind.
“EPRI’s concept is a robot integrated with the Live-Line Working Non-Ceramic Insulator Tool. It crawls up the insulator, collects readings with the tool, then crawls down, where you pull the tool off and get your results. It tells you if the unit is acceptable,” said Willis.
When EPRI lab-tested the robot with 10 different insulator configurations, the robot’s measurements proved more consistent than manual hotstick measurements. “But a lot of work is needed before the robot can be confidently applied in the field for all insulator designs,” said Willis.
EPRI is working with Southwest Research Institute to adapt that robot to work with porcelain insulators. Other enhancements under development include extending the arms and grip hands, extending the length of the robot, and incorporating advanced sensors to improve data quality and processing speed. “We can pack a lot more into a small robot and put cameras on every single arm,” said Willis.
Underground Cable Robots
Because most parts of underground cable systems are buried, visual inspections are conducted at discrete points: inside underground vaults known as manholes, at substations, or structures at junctions with overhead lines. Manholes are points of vulnerability, requiring regular inspections to assess the condition of cables, cable splices, joints, supports, and other equipment.
The confined space inside manholes presents challenges to thorough inspection. To avoid sending inspectors into the manhole, some utilities will maneuver a camera with a light source from the surface.
EPRI is analyzing robotic techniques for inspecting underground transmission cables to improve worker safety and reduce outages. “We’re investigating commercially available systems, their limitations, and how they could be adapted for underground cable use,” said EPRI Engineer/Scientist David Kummer. Challenges include image clarity, navigation, robot retrievability, and signal strength inside the manhole.
“We’re evaluating drones for inspecting the joints and other components in manholes,” said Kummer. “We have completed a test to determine imaging capabilities and understand the challenges when maneuvering in a manhole. Next we’ll test commercially available drones designed for confined space applications.” Kummer’s team is using a shipping container to build a mock manhole for testing these systems.
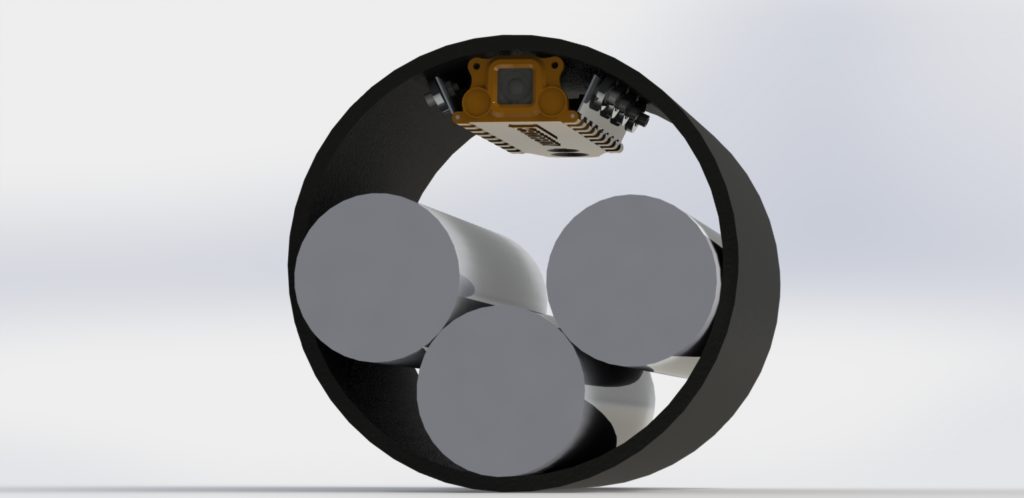
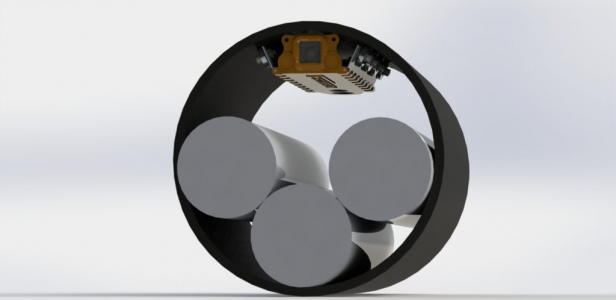
EPRI is examining systems in which three-phase cables are contained within a steel pipe and pressurized with oil. “We are evaluating a robot that can move inside the pipe and through the oil to inspect the cable,” Kummer said. A few manufacturers make robots designed for gas or water line inspection, raising the question of whether they can navigate effectively through oil and in a pipe containing a cable.
In EPRI’s Charlotte facility, Kummer and his team have built a robot prototype and mockups of pipes containing defective cables. “The robot measures 2 inches high by 11 inches long by 4 inches wide, carries two cameras, LED lights, and uses magnetic wheels to hold itself against the inside of the pipe so it doesn’t contact the cable,” he said. “In our laboratory, we manually pulled the robot through 20-foot sections of pipe with mocked-up cables to assess the imaging limitations. We identified many, but not all, of the defects implanted in the cable,” said Kummer.
EPRI is continuing to evaluate these and other technologies, including underwater robots.
Robots for Substation Security
Because substation security still relies largely on gates, guards, lights, and motion detectors to thwart theft, vandalism, and terrorism, EPRI is evaluating robotic technologies to bolster security.
“Today, there are at least a half-dozen commercially available, autonomous robots. EPRI is working with utilities on lab tests and field tests in operating substations. Only a few appear to be practical for continuous 24/7, 365-days-a-year outdoor duty, performing reliably in freezing winters and blistering summers in places as different as California, Texas, Minnesota, and New York,” said EPRI Senior Program Manager Kevin Berent.
Terrain is just as important as weather. According to Berent, “We are looking for robots that are rough and tough; can move through coarse gravel, dirt, snow, and mud; and can handle difficult terrain with minimal maintenance.”
Maintenance, especially in remote areas without personnel, can be challenging. “A lot of the robots have batteries that need to be exchanged. Some batteries are rechargeable, but reliable charging technology is not there yet in the models we’ve seen,” said Berent.
Mobility and size can help intimidate intruders. “Research shows that something moving around and as big as a riding lawnmower can have a deterrent effect, reducing crime. It can’t look like a toy. If the robot can directly engage an intruder in real-time via a microphone, speaker, video cameras, and flashing lights—all the better,” said Berent.
Multipurpose robots could enhance the business case for substation security. “A security robot that uses an infrared camera to detect trespassing at night could possibly use the same camera to check if equipment is running hotter than it should be,” said Berent. “We’re considering several possibilities. Could the robot be used to assist with maintenance? Could we add sensors to detect leaks of sulfur hexafluoride?”
Substation Inspection Robots
Robots offer potential value for substation inspection, including visual inspections and sensor-based monitoring of equipment condition, such as temperature, the presence of coronas, and oil and sulfur hexafluoride gas leaks. In 2019, EPRI Principal Technical Leader Poorvi Patel will identify applications and benefits and review commercially available technologies.
“After identifying promising technologies, we plan to do laboratory demonstrations in our new 138-kilovolt test substation, followed by utility field demonstrations,” said EPRI Senior Technical Executive Luke Van der Zel. “The objective is to evaluate sensor payloads and robot performance.” The next step is to develop a technical specification and application guideline for utilities.
Transformer Robots
Substation robots may also be used to inspect inside large transformers. Today’s inspections have significant shortcomings. “One approach involves lowering a camera or endoscope inside the transformer, but the range of access is limited,” said Patel.
The second approach is to drain the transformer oil—tens of thousands of gallons—and then send a person inside. After inspection, the oil is replaced. “It is time-intensive because it involves entry into a confined space and reprocessing of the oil,” said Patel.
EPRI has evaluated various commercially available robots for transformer inspections and identified and lab-tested promising options, then field-tested those with utilities. Guided by operators positioned outside the transformer, the robots swim through the transformer oil collecting video and still images of the interior. This eliminates the need for someone to enter the transformer.
EPRI’s controlled, repeatable lab research provided insights on the robots’ maneuverability, image and video quality, and ability to reach different sections of the transformer.
Key EPRI Technical Experts:
Andrew Phillips, Erika Willis, David Kummer, Kevin Berent, Luke Van der Zel, Poorvi Patel, Drew McGuire
For more information, contact techexpert@eprijournal.com.
Additional Resources:
Artwork by Craig Diskowski/Edge Design