Field Tests Demonstrate Robots’ Ability to Inspect Facilities That Store Used Fuel
EPRI and Robotic Technologies of Tennessee designed robots for inspecting used nuclear fuel storage casks, and nine field tests across the United States demonstrated that the robots can perform high-quality inspections. At Maine Yankee Nuclear Power Plant, the tests showed that casks are robust after their first 20 years of operation. “We can use this result to support our application to the U.S. Nuclear Regulatory Commission to continue using the casks,” said Maine Yankee Project Manager Paul Plante.
Robots designed to inspect used nuclear fuel storage facilities have performed well in nine field tests across the United States.
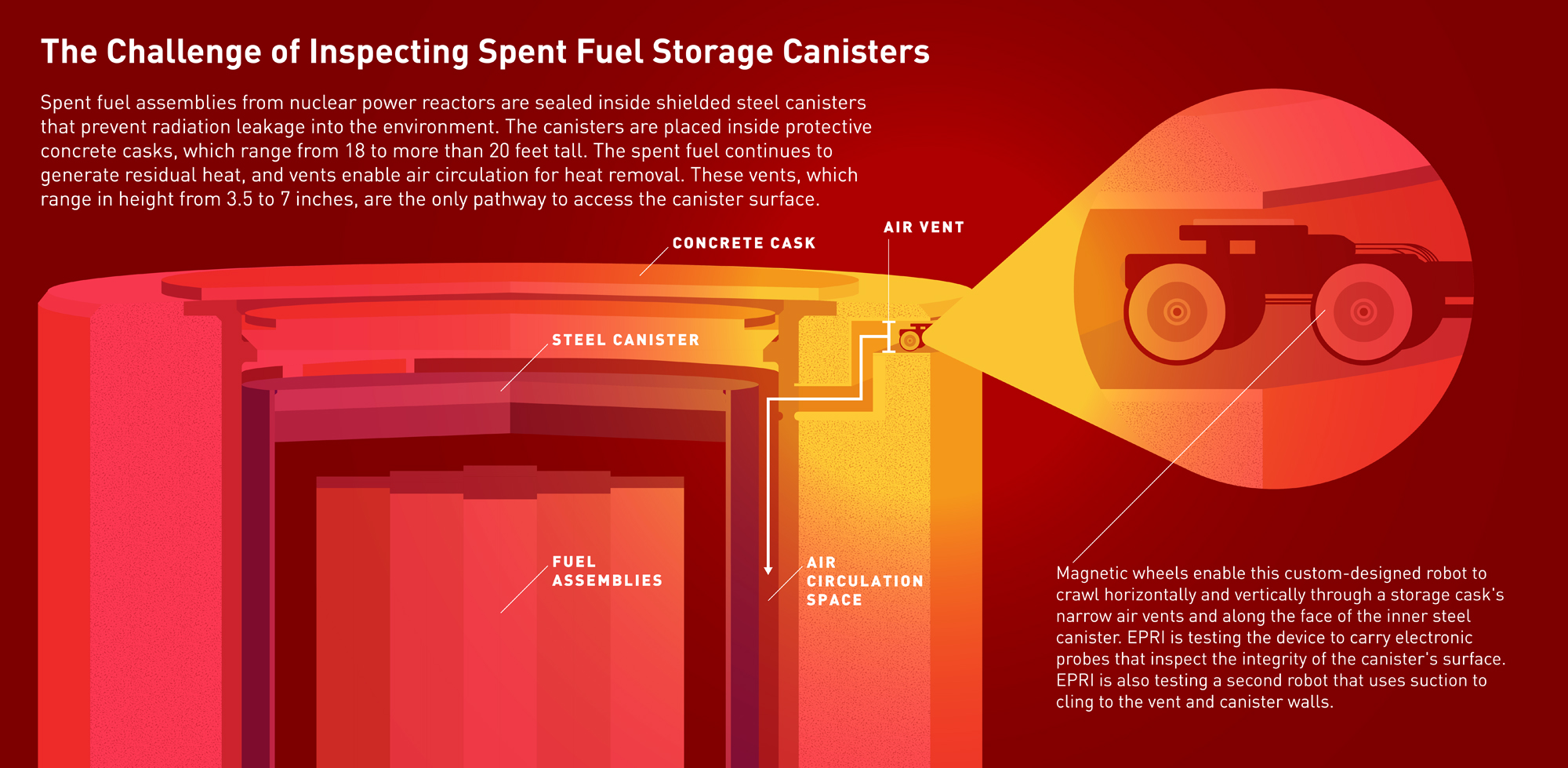
In the 1980s, the nuclear industry in the United States began storing used nuclear fuel in dry cask systems (see this 2016 EPRI Journal article for more on the history of used fuel storage). These consist of a basket of fuel assemblies, sealed with a chemically inert gas inside a shielded stainless steel canister, which in turn is placed in a 20-foot-tall concrete overpack or cask (see graphic below). Small air vents in the overpack permit passage of residual heat from the fuel.
Inspection is challenged by the confined spaces (1.75 to 7 inches high) used to access the canister surface. For several years, EPRI has developed and field-tested robots both small and nimble enough to examine the canister surface.
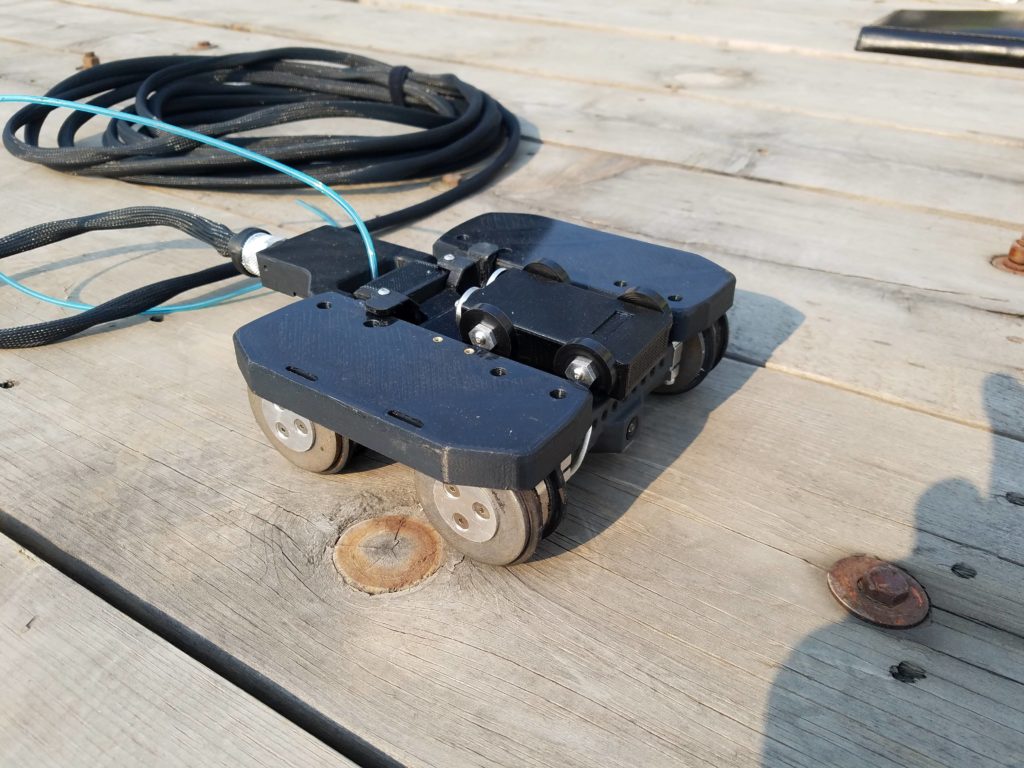
Designed by EPRI and Robotic Technologies of Tennessee, the robots can climb walls and move horizontally to position various nondestructive evaluation tools, including cameras and video systems, eddy current array probes, electromagnetic acoustic transducer probes (often known in the nuclear power industry as EMATs), radiation detectors, and temperature sensors. One robot uses magnetic wheels’ attraction to the carbon steel liners surrounding the canisters, minimizing contact with canister surfaces. A second robot uses suction to adhere to surfaces, providing the additional benefit of removing dust and debris.
During the field tests, robots successfully obtained high-resolution videos and other data relevant to the canisters’ surfaces.
“Our field tests have demonstrated that the robots are robust and can perform high-quality nondestructive examinations of several different designs of dry storage systems,” said EPRI Program Manager Jeremy Renshaw. “They can withstand the high temperatures and radioactivity inside casks and operate as designed with no loss of performance, and they are retrieved without any residual radioactivity.”
Field test locations included:
- Orano Dry Storage Facility (Aiken, South Carolina)
- Palo Verde Nuclear Station (Tonopah, Arizona)
- McGuire Nuclear Station (Huntersville, North Carolina)
- Maine Yankee Independent Spent Fuel Storage Installation—two deployments (Wiscasset, Maine)
- San Onofre Nuclear Generating Station—two deployments (San Diego County, California)
- Hatch Nuclear Power Plant (Baxley, Georgia)
- Pacific Northwest National Laboratory Dry Storage Test Mockups (Richland, Washington)
- Trojan Independent Spent Fuel Storage Installation (Columbia County, Oregon)
- Vermont Yankee (Vernon, Vermont)
The Maine Yankee, San Onofre, Trojan, and Vermont Yankee deployments tested the robots on canisters loaded with used fuel, while the other sites used empty canisters.
Inspections at the Maine Yankee site confirmed what plant operators had suspected. “We found some coating damage on the inside of the overpack, but no damage on the canister,” said Maine Yankee Project Manager Paul Plante. “Because the canister is the boundary that confines the fuel, the observation that it’s in good shape suggests that this group of casks are robust after their first 20 years of operation. The overpack is intended primarily for shielding, so coating damage is not a big deal. We can use this result to support our application to the U.S. Nuclear Regulatory Commission to continue using the casks.”














The findings from all inspections to date help confirm that cask systems are highly durable and can provide safe storage for decades.
Robotic cask inspection can reduce risk to workers. As robots enter and exit the casks, radiation exposure to personnel is low. Nuclear material doesn’t need to be moved, reducing the possibility of mishandling.
Prior to this effort, some plant operators had planned to transport casks to spent fuel pools to perform inspections. Other inspection approaches use heavy-lift equipment to move and rotate canisters. Relative to these approaches, EPRI’s robot requires fewer people and less time and reduces costs by about 90% or more.
Meet Another Wall-Climber: The Concrete “Crawler”
The fuel canister inspection robot is not the only wall-climbing robot that EPRI has developed. Since 2011, EPRI has built, demonstrated, and refined a robotic concrete crawler that can inspect concave, convex, and other hard-to-reach surfaces on large concrete structures at hydroelectric, nuclear, and fossil generation facilities. It carries equipment to measure and map specified areas of structures, as well as nondestructive evaluation devices that can inspect deeper concrete layers. In 2013, EPRI and New York Power Authority demonstrated the crawler at a hydroelectric plant.
EPRI Technical Expert:
Jeremy Renshaw
Diagram by Carl De Torres Graphic Design